The Jerkster
This page describes a self-oscillating (or autonomous) chaos circuit described by a third order differential equation. In mechanics, the third derivative of a coordinate is called its "jerk", as an extension of the terms "velocity" and "acceleration". The figure below gives the circuit diagram. The upper part of the figure details the structure of the building blocks or subcircuits used to build the main circuit. The main circuit, illustrated in the bottom part of the figure, consists of four subcircuits connected in a loop. The first three circuit blocks are voltage-controlled integrators (with "Z" a capacitance) and the fourth is a voltage-controlled gain block (with "Z" a resistance).
The first integrator includes a damping control, whereas the second two are undamped. Nonlinearity is provided by the three series-connected diodes, with the "NL Drive" control determining the strength of the nonlinearity. Modulation of the chaotic pattern is provided via the (-) input of the third integrator. The shape of the oscillations is determined by damping, drive and gain controls, whereas the overall running rate is determined by the rate control. The form of the differential equation describing the system is given in the figure. The coefficient "A" represents the damping, "K" represents the gain and "g" is the functional form of the nonlinearity.
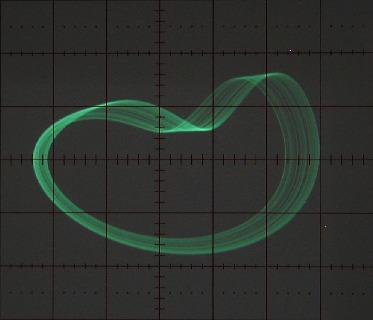
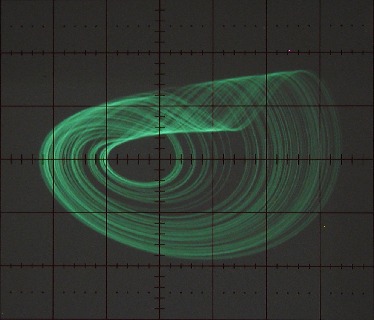
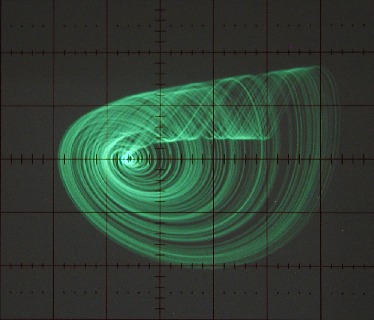
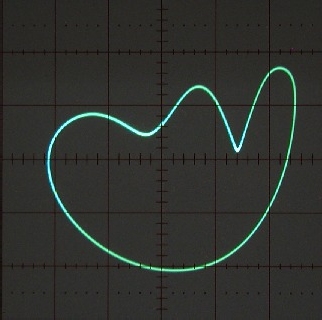
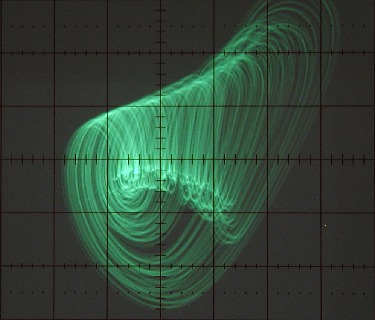
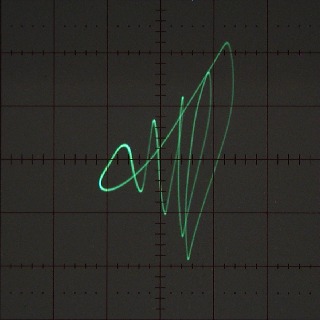
The scope shots below show some representative orbits, both chaotic and periodic, obtained with this system. The first four photos are a series of x-y traces with a relatively large damping and several increasing levels of gain. These are followed by two shots taken with lower damping. Finally, there are three representative orbits projected onto the x-z plane.
Here are some brief demo sound clips using the jerk system to control various synthesizer patches. These include sounds with continuous variations corresponding to the x, y, and z signals and also sounds with discrete events triggered by timing signals generated when the signals cross certain fixed thresholds.
Slow cycles
Jammin
Calls
Wattor
For further reading on jerk equations see the text: JC Sprott, Chaos and Time-Series Analysis, OUP (2003). The present circuit is an adaptation of ideas presented in: AS Elwakil, Chaos, vol. 14, p. 364 (2004).
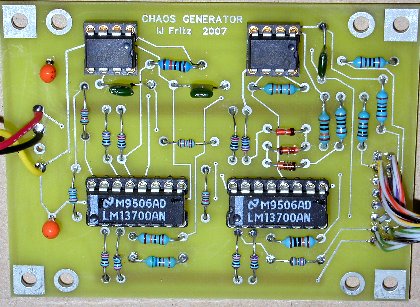
Here is a photo of a circuit board developed for this circuit:
Back Home